In the undergraduate BSME program at UNCC, Juniors are required to design and build a robot. I was tasked with designing a simple and lightweight robot to transfer simulated nuclear fuel rods.
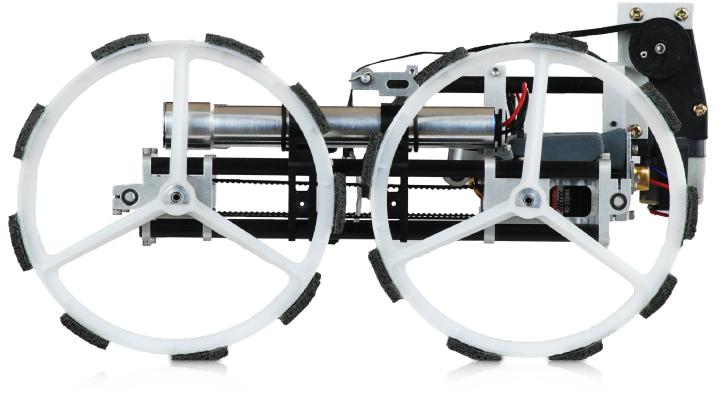
Weighing in at 1.2lb, it is quite light - most of the weight due to the required batteries. Every detail of the robot was refined to reduce weight, increase integration. Nothing that wasn't required was used, and every gram of material that could be removed was, right down to hollowing out all shafts. I employed finite element analysis to design the structural members to be as light as possible. The entire aluminium-composite frame weighs in at 0.2lb and all four wheels 0.085lb.
The only way to design such a robot was with sound engineering, attention to detail, and some good 3D CAD software.
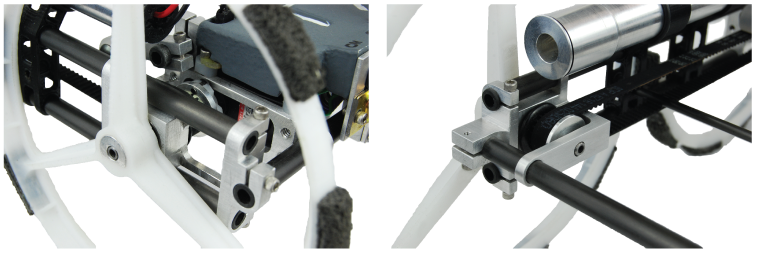
The components of the robot are tightly integrated, with each performing several different duties. The robot components were fabricated on a manual 3 axis mill, turret lathe, and a rapid prototype machine.
Another important aspect of the design was ease of assembly. The robot can be assembled in 10 minutes, thanks to the small parts count and the fact that all components self align.
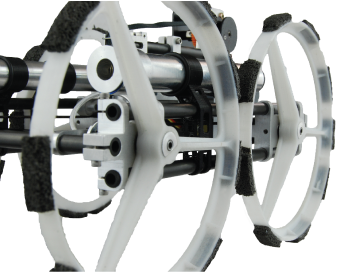

Plastic was used where appropriate. Extensive finite element analysis was performed on the wheels to ensure they could withstand accidental impact loading yet be as light as possible. All plastic components on the robot could easily be injection molded.
I also designed the control system for the robot which was required to be fully analog. Creative use of op-amps and timers allowed me to have full variable speed motion control of the robot via a single joystick. I laid out the circuits, etched them in muriatic acid, then assembled them.